動手玩創意/進階
出自六年制學程
目錄
- 1 槪述
- 2 課程內容
- 2.1 第一堂(三上)
- 2.2 第二堂
- 2.3 第三堂
- 2.4 第四堂
- 2.5 第五堂
- 2.6 第六堂
- 2.7 第七堂
- 2.8 第八堂
- 2.9 第九堂
- 2.10 第十堂
- 2.11 第十一堂
- 2.12 第十二堂
- 2.13 第十三堂
- 2.14 第十四堂
- 2.15 第十五堂
- 2.16 第十六堂
- 2.17 第十七堂
- 2.18 第十八堂(期末成果發表)
- 2.19 第十九堂(三下)
- 2.20 第二十堂(加入教育擴充包)
- 2.21 第二十一堂
- 2.22 第二十二堂
- 2.23 第二十三堂
- 2.24 第二十四堂
- 2.25 第二十五堂
- 2.26 第二十六堂
- 2.27 第二十七堂
- 2.28 第二十八堂
- 2.29 第二十九堂(考試)
槪述
課程目標
- 將數學邏輯和科學知識融入程式。
- 學會Mbot(機器人)和Arduino(開放式硬體)之相關知識。
- 將Arduino輸入端訊號,透過程式編排的執行,導入物聯網(IOT)概念。
- 利用mBlock(程式軟體)的積木式、多工程式為基礎,訓練程式邏輯概念。
內容
- 八年級
- 倒車雷達系統
- 閃避機器人
- 結帳收銀機
- 節奏遊戲
- Runing Robot
- 循環自行車
- 尋跡避障機器人
- 整合機器人功能
- 超音波吉他
- 巡邏機器人
- 九年級
- 迷宮機器人
- 光控風帆船
- 極限短壁球
- 巡機夾具機器人
- 金庫密碼
- 金手指對抗賽
- 刷卡機面板
上課規定
- 第一堂課選定座位,之後為固定座位。(請勿任意換座位)
- 使用電腦前,請務必檢查電腦(螢幕、鍵盤、滑鼠)是否正常。(如異常,請立即通知老師)
- 請勿攜帶筆電或平板進入電腦教室
- 請勿攜帶食物及飲料進入電腦教室
修課同學座位表
| 第四排 | 第三排 | 第二排 | 第一排 |
|---|---|---|---|
| 孫紹傑 | 許皓程 | 溫書桓 | |
| 莊坤霖 | 曾明哲 | 吳文翰 | |
| 丁 禾 | 柯智懷 | ||
| 洪仁益 | 張胤閎 |
課程內容
第一堂(三上)
- 教學進度
- 自選座位
- Mbot介紹
- Mbot組裝教學
- 感測器介紹
- 軟體安裝與連線準備
- Mblack軟體下載
- 安裝S4A操作介面
- 安裝Arduino軟體介面
- 安裝USB驅動程式
- 韌體上傳
- 硬體連線與測試
- 附錄
- 感測器介紹
| 腳位 | 元件名稱 | 腳位 | 元件名稱 |
|---|---|---|---|
| A0 | 滑桿可變電阻 | D10 | 紅色LED |
| A1 | 光感測元件 | D11 | 綠色LED |
| A2 | 麥克風 | D4 | 連續旋轉伺服馬達 |
| D2 | 按鍵開關 | D7 | 連續旋轉伺服馬達 |
| D9 | 蜂鳴器 |
第二堂
- 教學進度
- 請依RGB三原色比例調出5種顏色
- 按鈕模式控制
- 製作以一個按鈕控制5種顏色
- 按一下→紅色
- 按二下→橙色
- 按三下→黃色
- 按四下→自訂顏色
- 按五下→自訂顏色
- 任務一
- 使用兩角色(老鼠、蘋果)
- 按一按鈕,使老鼠移動到蘋果處發出聲音
- 任務二
- 使蘋果上下移動
- 瞄準並按下按鈕,使老鼠與蘋果X座標相同
第三堂
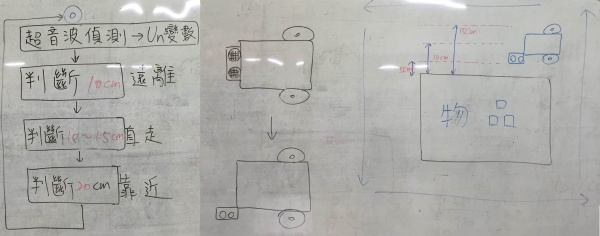
- 教學進度 - 認識超音波感測器
- 感測距離約1~400公分
- 程式積木,機器人模組(超音波感應器連接埠)
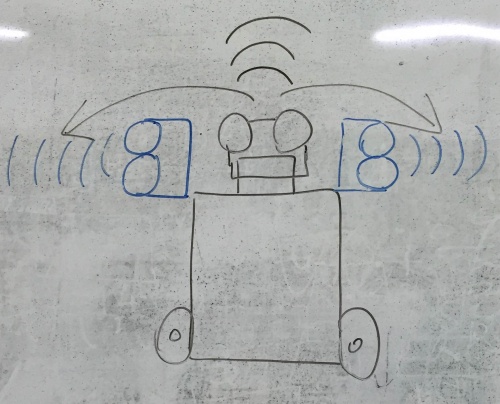
- 認識倒車雷達系統
- 認識自動閃避機器人
- 任務一
- 設置偵測距離(距離內亮紅燈,距離外亮綠燈)
- 任務二
- 製作倒車雷達系統,配合馬達、警示音、警示燈
- 任務三
- 配合車輛轉向,並執行自動閃避,使車輛不會停止或卡住
第四堂
- 教學進度-Mbot無法使用事件綠旗控制LED、蜂鳴器或馬達測器排除方法
- 檢查MBlock的連接→恢復出場程序,檢查是否可使用
- 可使用:使mcore恢復出場程序
- 不可用:將Make Block資料夾放置本機文件→Arduino→Libraries
- 檢查MBlock的連接→恢復出場程序,檢查是否可使用
- 任務一
- 將mbot恢復出場程序後,再將mbot與2.4G無線模組連結,並測試是否連線成功
- 製作一段控制LED燈的程式並執行測試
- 任務二
- 使用當按下方向鍵與當鬆開方向鍵做前進、後退、左轉、右轉的控制
- 測試與動力調整
第五堂
- 教學進度 - 程式初始化
- 宣告變數
- 變數初始化(歸零)
- 宣告副程式(除了主要程序外的程式都稱為副程式)
- 任務一(猜猜看遊戲步驟)
- 在遊戲畫面選擇其中一按鈕(腳色)
- 讓電腦亂數產生一個數字
- 讓程式比對玩家選擇的數字
- 相同:使背景變更為猜到了!
- 不同:使背景變更為沒猜到!
第六堂
- 教學進度
- 電子模組
- 光感應器
- 觸碰感應器
- 重點教學
- 利用廣播功能呼叫副程式
- 設定一變數並將感測器數值存入變數中,利於監控數值
- 電子模組
- 任務一(砲台遊戲)
- 腳色
- 蝙蝠
- 砲台
- 砲彈
- 砲彈射擊到蝙蝠得一分
- 蝙蝠碰到砲台終止遊戲
- 腳色

第七堂
- 教學進度
- 紅外線感應(算術大挑戰)
- 紅外線通訊規格大類分為三類
- 紅外線發射器與接收器規格都一樣
- 紅外線肉眼看不見但可用手機相機看見
- 紅外線感應(算術大挑戰)
- 任務一
- 用紅外線遙控器控制蝙蝠移動
- 製作多個分數球隨機出現
- 每30秒判別一次搜集的點數是否與題目相同
- 設置歸零球
- 變數:得分、時間、題目、分數
第八堂
- 教學進度 (結帳收銀機)
- 光線感應器應用
- 條碼判別
- 顏色判別
 三顆不同顏色的LED
三顆不同顏色的LED
- 任務一
- 製作一個商品列表
- 製作三個角色
- 西瓜
- 香蕉
- 結帳員
- 製作結帳按鈕

第九堂
- 教學進度 (節奏遊戲)
- 認識邏輯設計
- And
 And
And - Or
 Or
Or - Not
- And
- 認識邏輯設計
- 任務一 (製作節奏遊戲)
- 製作四個角色
- 海星
- 鳥
- 螃蟹
- 線
- [遊戲圖]
- 角色碰到紅線就得到一分
- 時間倒數一分鐘
- 製作四個角色


第十堂
- 教學進度 (Runing Robot)
- 車輛轉向方法
- 直走
- 後退
- 前進左轉
- 前進右轉
- 原地左轉
- 原地右轉
- 2.4G無線通訊連線,使用無線載波傳送訊息
- 車輛轉向方法
- 比賽規則
- 在場地範圍內比賽出界即出局
- 兩人一組兩顆氣球均爆破即獲勝
第十一堂
- 教學進度 (循環自行車)
- 紅外線感應器原理
- 黑色:將所有光線吸收不反射
- 白色:將所有光線反射不吸收
- MBot感應器四種感應數值
- 紅外線感應器原理


第十二堂
- 教學進度(尋跡避障機器人)
- 複習尋線感測器回傳值
- 使用超音波感測器偵測物品並避開
- 尋跡程式與避障程式優先權討論
- 銳角路線尋跡方法

第十三堂
- 教學進度(整合機器人功能)
- 將燈號"紅黃燈"輪流亮燈
- 每隔1秒換燈號1次
- 每隔2秒換燈號1次
- 每隔3秒換燈號1次
- 每隔4秒換燈號1次
- 將避障與紅外線遙控整合
- 按遙控器上的A按鈕,即做紅外線遙控。
- 按遙控器上的B按鈕,即做避障功能。
- 將燈號"紅黃燈"輪流亮燈
第十四堂
- 教學進度(賽馬大亨)
- 使用觸碰按鈕,使用計時器模組(Timmer)
- 計時器啟動
- 計時器歸零
- 使用觸碰按鈕,使用音效
- 開始按鈕的音效
- 結束按鈕的音效
- 按鈕增加的音效(燈光)
- 使用觸碰按鈕,使用計時器模組(Timmer)
- 任務
- 設定計時10秒鐘
- 10秒鐘內增加按鈕次數
- 10秒後始按鈕次數當作車子行駛秒數
- 比賽一定距離內誰行駛得快
第十五堂
- 教學進度(超音波吉他)
- 認識距離範圍限制
- 認識封閉和弦把位
- 感應器設計
- 超音波:偵測距離高低音
- 觸碰按鈕:撥弦聲音開關
- 尋線感應器:調整大小聲

- 任務
- 超音波偵測需延遲0.3秒
- 和弦
- Do(C)
- Re(D)
- Mi(E)
- Fa(F)
- So(G)
- La(A)
- Si(B)
- Do(C)
第十六堂
- 教學進度(巡邏機器人)
- 超音波距離感測應用
- 超音波位置改正
- 馬達控制(微調)指令介紹
- 任務
 任務說明
任務說明

第十七堂
- 考試分數說明
- 60分:輸入裝置X2、輸出裝置X1
- 10分:增加動畫
- 5分:增加一個輸入裝置
- 5分:增加一個輸出裝置
- 選課學生
- 溫書桓
- 主題:循線+避障
- 主題敘述
- 跟著黑線躲開障礙物。
- 使用裝置
- 按鈕
- 馬達
- LED登
- 超音波
- 電腦動畫
- 電腦聲音
- 循線感測器
- 蜂鳴器(板子的聲音)
- 吳文翰
- 主題:賽車
- 主題敘述
- 要用鍵盤控制藍芽傳出用動畫作一個動作要閃一個光。
- 使用裝置
- 鍵盤
- 動畫
- LED燈
- 藍芽感測器
- 柯智懷
- 主題:射擊遊戲
- 主題敘述
- 使用循線感應器控制方向、按鈕發射子彈,擊中與非擊中各有不同LED燈號。
- 使用裝置
- 循線感應器
- 車上綠色按鈕
- 車載LED燈
- 張胤閎
- 主題:撞翻車
- 描述:
- 把對方撞出去,撞翻過去也可以。
- 使用裝置:
- 鍵盤
- 循線感應器
- 超音波感測器
- 許皓程
- 主題:遙控車
- 主題敘述
- 利用鍵盤控制mbot讓他可以前後左右。
- 使用裝置
- LED
- 馬達
- 鍵盤
- 蜂鳴器
- 超音波感測器
- 曾明哲
- 主題:吉他
- 主題敘述
- 按下按鈕時,超音波偵測手裡燒音波感測器多遠,越遠發出聲音越低,越近發出聲音越高。
- 使用裝置
- 聲音
- 按鈕
- 超音波感應器
- 丁 禾
- 主題:車車走黑線
- 主題敘述
- 以按鈕觸發事件,讓循線感應器感應,讓車沿著黑線走,並用超音波感應器,讓車繞過在路徑上的障礙物,LED燈會因不同的狀態切換顏色。
- 使用裝置
- 按鈕
- 循線感應器
- 超音波感應器
- 洪仁益
- 主題:
- 主題敘述
- 超音波偵測距離,並和被巡邏的物體保持距離,馬達轉動輪子,輪子不同的方向,用不同的顏色光。
- 使用裝置
- LED
- 馬達
- 超音波
- 循線感應器
- 孫紹傑
- 主題:賽車
- 主題敘述
- 使用鍵盤操控方向。
- 使用裝置
- 馬達
- 鍵盤
- 藍芽
- 莊坤霖
- 主題:尋走車
- 主題敘述
- 用遙控器控制mobt的模式,各種模式有各種音樂光線。(模式1尋線、模式2自由、模式3跳舞、模式4躲避)
- 使用裝置
- LED
- 遙控器
- 蜂鳴器
- 尋線感測器
- 超音波感測器
- 溫書桓
第十八堂(期末成果發表)
- 報告說明
- 報告時間:10分鐘
- 展示作品:2分鐘
- 製作PPT:事前準備
- 報告流程
- 成果發表
- 成果展示
- Q&A
- 報告順序
- 溫書桓
- 吳文翰
- 柯智懷
- 張胤閎
- 許皓程
- 曾明哲
- 丁 禾
- 洪仁益
- 孫紹傑
- 莊坤霖
第十九堂(三下)
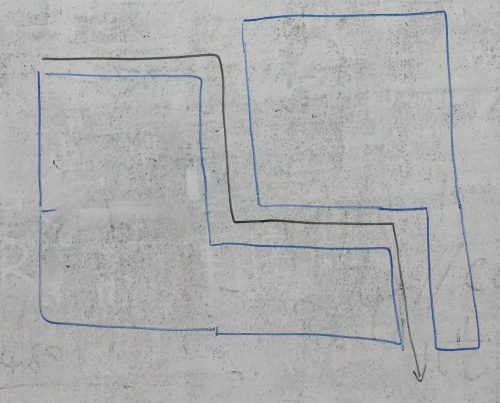
- 教學進度(迷宮機器人)
- 動作分解
- 直走到超音波<15公分。
- 左轉90度,並記錄超音波。
- 右轉180度,並記錄超音波。
- 判斷出路並轉向。
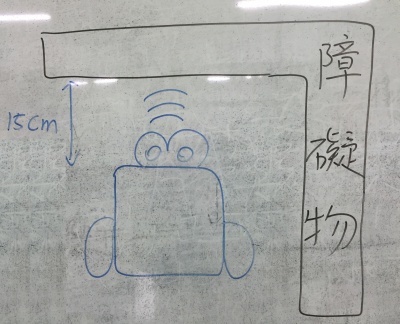 障礙物圖示
障礙物圖示
- 任務
- 測試左轉90度的馬達動力值。
- 測試右轉90度的馬達動力值。
- 設計輔助測試的燈號與音效延遲秒數。
- 動作分解

第二十堂(加入教育擴充包)
- 教學進度(光控風帆船)
- 光感應器應用。
- 海上常用信號傳遞(光線)。
- 船帆機構組裝(伺服馬達)角度控制。

- 任務
| 秒數控制 | 伺服 | 轉向 |
|---|---|---|
| 控"↑"閃1下 | 前90度 | 直走 |
| 控"↓"閃2下 | ||
| 控"←"閃3下 | 左0度 | 左轉 |
| 控"→"閃4下 | 右180度 | 右轉 |
第二十一堂
- 教學進度(極限短壁球)
- 認識搖桿
- 數值讀取觀察。
- 座標關係。
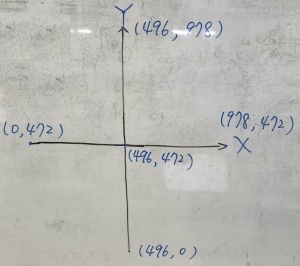 座標關係圖
座標關係圖
- 認識搖桿
- 任務
- 第一關: 0~10秒,隨機方向發射,碰到牆反彈。
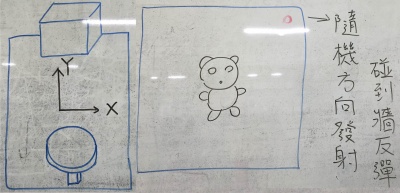 左:搖桿圖,右:電腦畫面圖示
左:搖桿圖,右:電腦畫面圖示 - 第二關:11~20秒,躲避球加速。
- 第三關:21~30秒,速度回復球變大2倍。
- 第四關:自行設計規則。
- 第五關:自行設計規則。
- 第一關: 0~10秒,隨機方向發射,碰到牆反彈。


第二十二堂
- 教學進度(巡機夾具機器人)
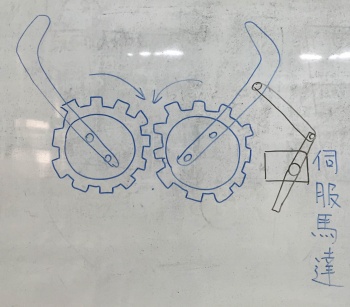 夾具機構設計A
夾具機構設計A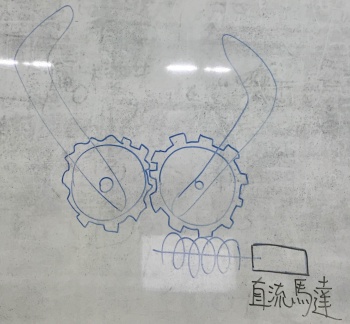 夾具機構設計B
夾具機構設計B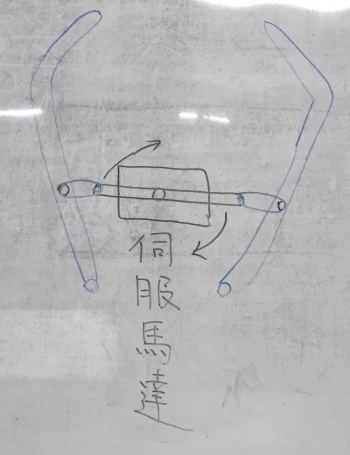 夾具機構設計C
夾具機構設計C - 任務
- 循跡並將軌道上之障礙物排除



第二十三堂
- 教學進度(金庫密碼)
- 使用搖桿控制
- 認識密碼比對模式
- 數字比對模式:將所有密碼轉換為"數字"
- 字串比對模式:將所有密碼轉換為"字串"
- 任務
- 密碼為隨機出題
- 單數密碼為國字:左or右
- 雙數密碼為數字:1~5

第二十四堂
- 教學進度(金手指對抗賽)
- 認識限位開
- 限制機構移動位置
- 機械式 (按鈕)
- 數位式 (紅外線)
- 另類觸碰感測器
- 限制機構移動位置
- 認識限位開


第二十五堂
- 教學進度(刷卡機面板)
- 認識Mbot表情面板
- 工作電壓5V
- LED矩陣8X16=128
- 認識LED矩陣工作方法
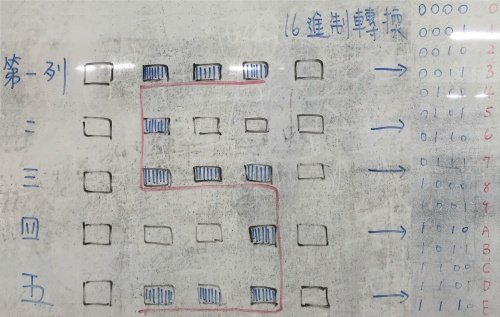 顯示數字5
顯示數字5 - 視覺暫留
- 人眼對於不同顏色的光,有不同的暫留時間,最慢頻率約10fps。(EX:日光燈約100次/秒)
- 認識Mbot表情面板
- 任務
- 顯示時間
- 製作4個以上表情,輪流顯示
- 製作刷卡機跑馬燈

第二十六堂
- 教學進度(雷達偵測站)
- 超音波定位與畫面圖示
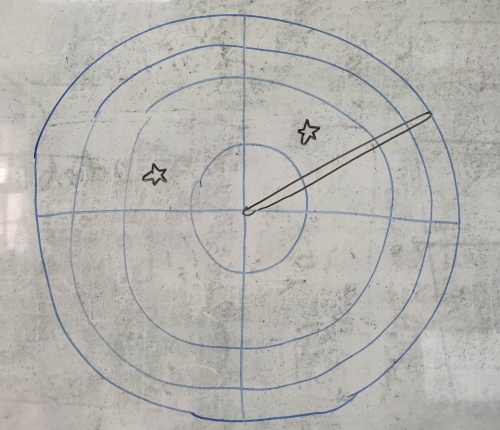 雷達偵測站
雷達偵測站
- 超音波定位與畫面圖示
- 任務
- 製作機器人將超音波感測器安裝伺服馬達上,使偵測範圍變大,並將偵測到的物品位置,顯示在雷達圖上。
- 步驟
- 使伺服馬達可來回擺動
- 使雷達圖上偵測方向,能隨伺服馬達轉動方向動作
- 製作定位程式

第二十七堂
- 教學進度(迷宮機器人)
- 複習距離比較程式
- 使用伺服馬達製作
- 加入巡邏機器人功能,循線感應器遇到白線需回頭巡邏
 機器人圖示
機器人圖示
- 任務
- 比較程式架構
- 轉動伺服馬達往左並記錄感測值LD
- 轉動伺服馬達往右並記錄感測值RD
- 比較LD和RD後轉向較大值方向
- 新增程式功能
- LD與RD相差值須大於10,才開始動作
 線路圖示
線路圖示
- LD與RD相差值須大於10,才開始動作
- 比較程式架構


第二十八堂
- 教學進度(荒島指南針)
- 認識電子羅盤
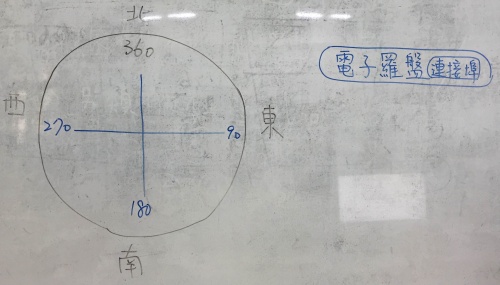 電子羅盤
電子羅盤
- 認識電子羅盤
- 任務
- 製作指北車
- 設計一指北車,當方向接近北方時發出綠光,並且發出越來越密集的嗶嗶聲
- 製作指北車

第二十九堂(考試)
- 考題
- 可用感測器
- 搖桿
- 限位開關
- 超音波
- 電子羅盤
- 巡線感應器
- 可用輸出裝置
- 直流馬達
- 伺服馬達
- 表情面板
- 動畫
- 可用感測器
- 任務
- 使用超音坡或搖桿來設定模式1與模式2。(20分)
- 模式1:使用表情面板可變化3種表情,並使用伺服馬達使面板擺動。(20分)
- 模式2:製作跑馬燈顯示自己的姓名與電話。(20分)
- 完成可搖擺面板的機構。(20分)
- 創意加分(使用電子羅盤10分,創意想法10分)。(20分)
- 使用超音坡或搖桿來設定模式1與模式2。(20分)
- 總成績算法
- 考試成績:60%
- 平時成績(上課程式繳交):40%